«Кадет-М»: новый шаг в развитии морской робототехники

Центр развития инновационной деятельности СПбПУ приступил к испытаниям многофункциональной надводной роботизированной беспилотной платформы «Кадет-М». И одновременно объявил о старте Всероссийских соревнований по морской надводной робототехнике для школьников.
Отборочный этап пройдет в заочном формате. Принять участие в соревнованиях может любой желающий в возрасте от 13 до17 лет: для этого нужно собрать команду из трех-четырех человек и зарегистрироваться на официальной странице соревнований «ИНТЭРА – морская надводная робототехника». Юные умы смогут сначала дистанционно попрактиковаться в решении сложных задач и навыках управления, а потом, когда спадет эпидемия коронавируса, то и лично поуправлять катамараном-роботом.
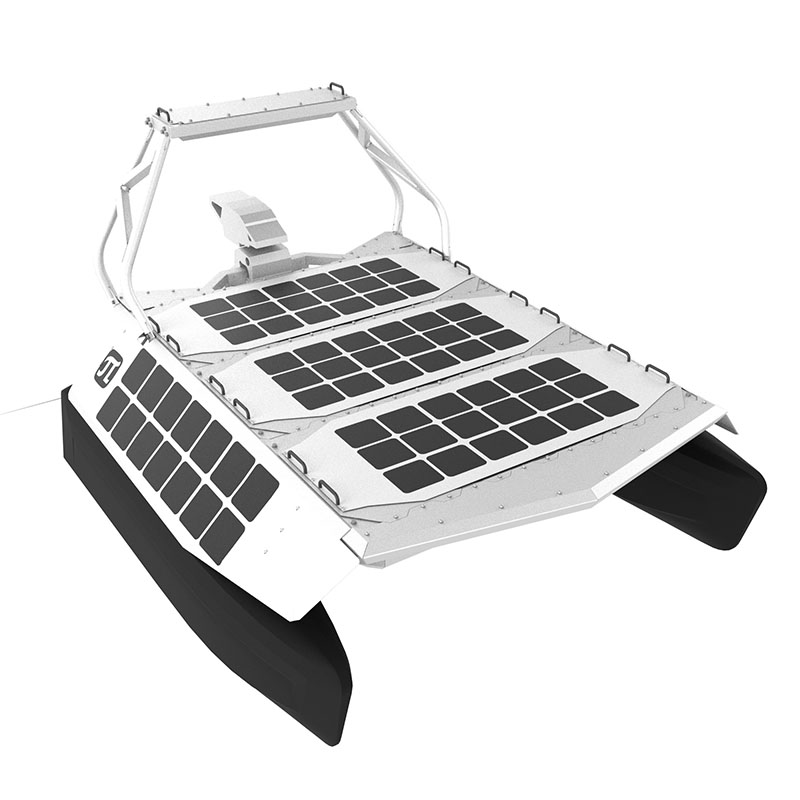
Команда изобретателей из Санкт-Петербургского политехнического университета Петра Великого разработала многофункциональную надводную роботизированную беспилотную платформу «Кадет-М», «быструю и красивую как Lamborghini, беспилотную и электрическую, как Tesla, но на воде», как представляет ее директор Центра развития инновационной деятельности СПбПУ, ассистент Высшей школы физики и технологий материалов и руководитель проекта Алексей МАЙСТРО.
Это большой шаг в развитии морской робототехники России, ведь платформа не только выглядит футуристично, но и может выполнять огромный спектр задач благодаря интеллектуальной системе управления.
Современные условия с загрязнением окружающей среды требуют особых решений для новой техники, так что команда сделала платформу максимально экологически чистой: корпус изготовлен из полимерных композиционных материалов, а на поверхности располагаются солнечные модули, обеспечивающие дополнительный источник энергии. Каркас же выполнен из высокопрочных алюминиевых сплавов.
Вся конструкция составная и легко разбирается для удобства транспортировки. Длина «Кадет-М» составляет два метра, при этом он может выдерживать полезную нагрузку 50 кг, с которой судно способно развить скорость до 12 узлов (22,2 км/ч).
Система автономного управления умеет отрабатывать влияние воздействий внешней среды и принимать решения, исходя из полученной информации, что позволяет избегать столкновений и неблагоприятных погодных условий.
Благодаря интеллектуальной бортовой системе оператор может дистанционно давать «Кадету» задачи, которые будут выполняться автономно.

Судно оснащено метеостанцией с возможностью временной фиксации данных (количества осадков, скорости и направления ветра, уровня солнечной радиации и т.д.), водонепроницаемой бортовой палубной видеокамерой с дистанционной передачей данных, GPS с функцией RTK 0,5-метровой точности для временной и пространственной фиксации положения судна.
Уникальность платформы в том, что на нее можно установить модули полезной нагрузки в разных сочетаниях, определяемых требованиями миссии судна. Один из модулей – механическая рука с шестью степенями свободы и сменными механическими захватами. С помощью такой роботизированной руки можно собирать образцы водорослей и породы, подбирать плавающий мусор, передавать предметы или проводить операции по обслуживанию надводных объектов. Другой модуль – устройство для взятия проб воды на заданной глубине (до 30 м) с экспресс-анализом состава и построением карты загрязнений. Здесь же установлен бортовой дозиметр. Третий модуль – эхолот, дистанционно передающий батиметрические данные оператору и строящий 3D-карты глубин. В этом модуле есть и подводная видеокамера с возможностью погружения до 25 метров для обследования артефактов.
Последний и самый важный модуль – это бортовой компьютер с системами технического зрения и принятия решений, позволяющий двигаться при разных сценариях управления: полностью автономный, полуавтоматический, радиоуправляемый.
В дальнейшем команда разработчиков планирует создать «рой» подобных судов с общей интеллектуальной системой для выполнения более масштабных задач.
Материал подготовлен Медиа-центром СПбПУ.
Материал взят с портала "Политех Media".

