Аспирант ИММиТ из Сирии разработал устройство для людей с ограниченными возможностями
.jpg)
Сомар Берро приехал в Россию из Сирии. В Политехническом университете он учится в аспирантуре Высшей школы автоматизации и робототехники ИММиТ, где занимается созданием специальной манипуляционной адаптивной системы, которая должна помочь людям с ограниченными возможностями. О том, что это за система, как она работает, и планируется ли в будущем серийное производство — читайте в нашем интервью.
— Сомар, откуда возникло ваше увлечение робототехникой?
— Я люблю роботов с детства. С удовольствием смотрел мультфильмы про роботов, например, мультсериал «Грендайзер». Там был одноименный робот, и я думал: когда-нибудь и я создам своего Грендайзера. Потом была школа, университет, и после бакалавриата я решил, что робототехника — это моя область, и я буду этому учиться.
— Когда появилось желание приехать в Россию?
— Я решил приехать в Россию, потому что между нашими странами существует сотрудничество в сфере науки и образования. Конечно, поначалу было непросто — в особенности из-за языкового барьера. Но получилось так, что я достаточно быстро выучил русский язык, и стало легче. У нас хорошие отношения с коллегами, мы работаем над интересным проектом.
— Расскажите, что это за проект?
— Это разработка манипуляционной реабилитационной системы, мою работу координирует мой научный руководитель — профессор Андрей Тимофеев. В будущем система поможет людям, которые лишились верхних конечностей, выполнять работу, связанную с мелкой моторикой.
— А можете привести пример такой работы?
— Например, человек создавал ювелирные изделия или занимался живописью. То есть его работа требовала точных и мелких движений. А потом вдруг по какой-то причине лишился кисти. Наше устройство поможет ему воспроизводить необходимые движения, будь то рисование или паяние микросхемы.
— Можно ли сказать, что вы занимаетесь разработкой протеза?
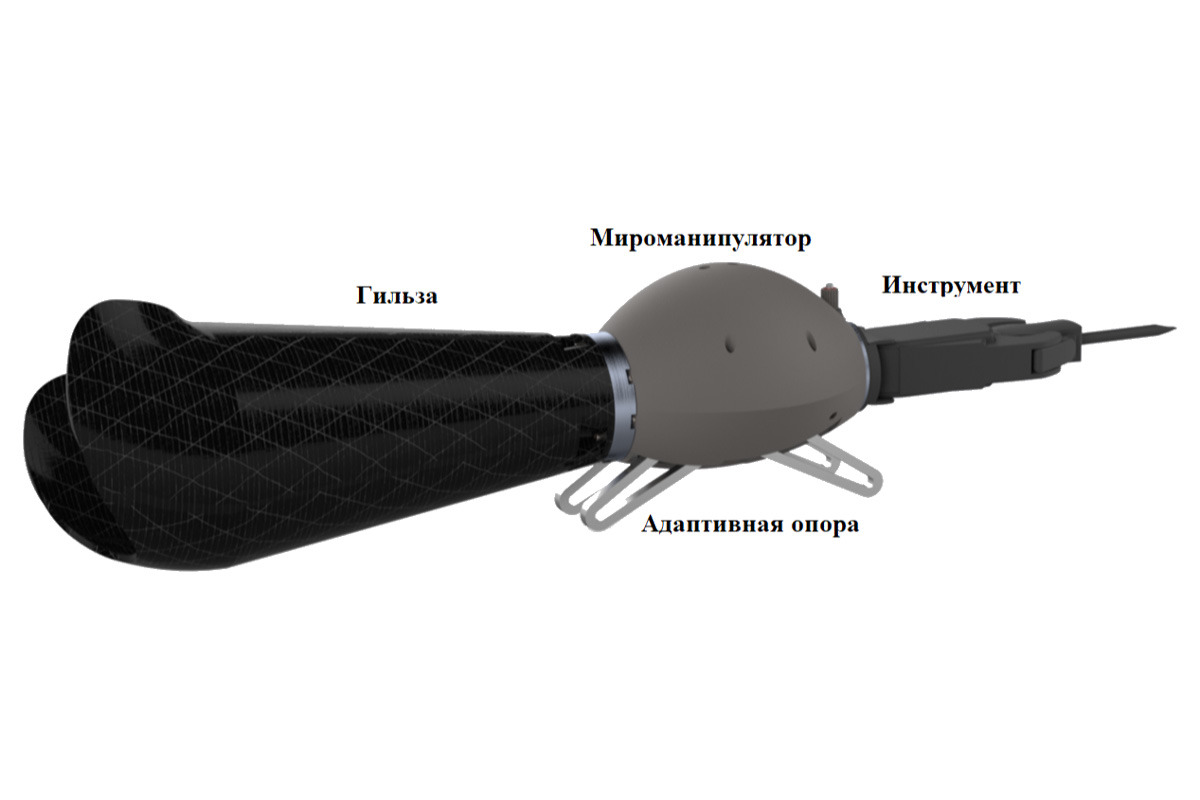
— Не совсем. Наше устройство можно как встроить в специальный протез, так и установить на уже существующий готовый протез. Оно состоит из микроманипулятора и адаптивной опоры. Микроманипулятор управляется датчиками, измеряющими давление культи на культеприемную гильзу протеза. Культя — это часть конечности, которая остается после ампутации. А культеприемная гильза, или культеприемник, — это часть протеза, которая соединяет конечность и протез.
— А адаптивная опора для чего нужна? И как работает система?
— Адаптивная опора нужна для того, чтобы зафиксировать протез в удобном для человека положении. Например, установить его на столе или любой другой поверхности. Представим, что мастеру нужно установить миниатюрный винт в часы. Для этого на манипулятор он устанавливает нужную отвертку. Намагниченное жало отвертки забирает миниатюрный винт. Мастер произносит голосовую команду, адаптивная опора опускается на стол и фиксирует протез в удобном для работы положении. Человек управляет микроманипулятором, надавливая на культеприемник. Погрешность, с которой микроманипулятор перемещает жало отвертки, меньше 0,1 мм. Можно сказать, погрешность минимальная. Для того, чтобы включить отвертку, нужно снова произнести голосовую команду. Так микроманипулятор введет винт в резьбовое отверстие и закрутит.
— Думаете ли вы над тем, чтобы запустить свое изобретение в серийное производство?
— Сейчас мы разработали и исследовали проектный облик протеза со встроенным микроманипулятором и адаптивной опорой. Также получили патент на образец протеза кисти. В скором времени планируем получить еще несколько патентов по этой тематике. Но до практической реализации еще довольно далеко, хотя, конечно, хотелось бы, чтобы люди могли пользоваться нашей системой.
— Сомар, поделитесь, какие у вас планы на будущее?
— После защиты диссертации я хотел бы вернуться домой, в Сирию, чтобы внести свой вклад в развитие сектора робототехники в стране.
Материал подготовлен международными службами СПбПУ

